Fast Failure Detection to Speed Network Convergence
OVERVIEW
In
both Enterprise and Service Provider networks, the convergence of
business-critical applications onto a common IP infrastructure is
becoming more common. Given the criticality of the data, these networks
are typically constructed with a high degree of redundancy. While such
redundancy is desirable, its effectiveness is dependant upon the ability
of individual network devices to quickly detect failures and reroute
traffic to an alternate path.
This
detection is now typically accomplished via hardware detection
mechanisms. However, the signals from these mechanisms are not always
conveyed directly to the upper protocol layers. When the hardware
mechanisms do not exist (eg: Ethernet) or when the signaling does not
reach the upper protocol layers, the protocols must rely on their much
slower strategies to detect failures. The detection times in existing
protocols are typically greater than one second, and sometimes much
longer. For some applications, this is too long to be useful.
Bi-directional
Forwarding Detection (BFD) provides rapid failure detection times
between forwarding engines, while maintaining low overhead. It also
provides a single, standardized method of link/device/protocol failure
detection at any protocol layer and over any media.
THE PROBLEM WITH CONVERGENCE
The process of network convergence can be broken up into a set of discreet events*:
• Failure detection:
the speed with which a device on the network can detect and react to a
failure of one of its own components, or the failure of a component in a
routing protocol peer.
• Information dissemination: the speed with which the failure in the previous stage can be communicated to other devices in the network
• Repair:
the speed with which all devices on the network-having been notified of
the failure-can calculate an alternate path through which data can
flow.
An improvement in any one of these stages provides an improvement in overall convergence.
The first of these stages-failure detection-can be the most problematic and inconsistent.
• Different routing protocols use varying methods and timers to detect the loss of a routing adjacency with a peer
• Link-layer failure detection times can vary widely depending on the physical media and the Layer 2 encapsulation used
• Intervening devices (eg: Ethernet switch) can hide link-layer failures from routing protocol peers
Packet
over SONET (POS) tends to have the best failure detection time amongst
the different Layer 1/2 media choices. It can typically detect and react
to media or protocol failures in ~50 milliseconds. This has become the
benchmark against which other protocols are measured.
BFD
can provide fast failure detection times for all media types,
encapsulations, topologies, and routing protocols. In the best-case
scenario, it can provide fast failure detection similar to that found in
POS.
*
The stages of convergence listed here provide a high-level overview of
the process. Each stage could be further subdivided into several
sub-stages.
A
secondary benefit of BFD, in addition to fast failure detection, is
that it provides network administrators with a consistent method of
detecting failures. Thus, one availability methodology could be used,
irrespective of the Interior Gateway Protocol (IGP) or the topology of
the target network. This eases network profiling and planning, because
reconvergence time should be consistent and predictable.
Common BFD applications include:
• Control plane liveliness detection
• Tunnel endpoint liveliness detection
• A trigger mechanism for IP/MPLS Fast ReRoute
• MPLS Label Switching Protocol date plane failure detection
HOW BFD WORKS*
BFD
verifies connectivity between two systems. In the first phase of
development, Cisco will support BFD Asynchronous mode, which depends on
the transmission of BFD control packets between the two systems.
BFD Packet Formats
The
Internet Draft for BFD does not specify a specific encapsulation type
for BFD control packets; rather, it recommends the use of an
encapsulation "appropriate to the medium and the network". Because the
first phase implementation from Cisco will focus on verifying IP
connectivity, UDP encapsulation will be used. BFD payload control
packets will be encapsulated in UDP packets, using destination port 3784
and a source port in the range of 49152 to 65535**. Even on shared
media, like Ethernet, BFD control packets are always sent as unicast
packets to the BFD peer.
The
payload of a BFD Control packet (defined in the BFD Internet Draft) is
illustrated in Figure 1, with some additional comments relevant to the
Cisco implementation.
Figure 1. BFD Control Packet Payload

*
Cisco implementation of BFD is based on an Internet Engineering Task
Force (IETF) draft. The complete text of the draft can be found at the
IETF BFD Working Group page at http://www.ietf.org/html.charters/bfd-charter.html.
Cisco implementation of BFD will be released in phases, with additional
functionality and platform support added in each phase. The IETF draft
describes some capabilities, which may not be implemented until
subsequent phases.
**
This conforms to another IETF Draft which specifies how BFD should be
used in single-hop IPv4 or IPv6. For more information, see the IETF BFD
Working Group page: http://www.ietf.org/html.charters/bfd-charter.html
*
BFD has two different modes: Asynchronous and Demand. In the first
phase of BFD development, Cisco will support Asynchronous mode. All
subsequent discussion in this section will assume that Asynchronous mode
is being used. See the previously referenced Internet Draft for more
detail on the differences between these modes.
BFD Initial Session Setup
To
better understand how BFD is implemented, consider an example. Imagine
two routers, each of which runs EIGRP, connected over a common medium.
Both routers have just started up, so no BFD session has been
established.
In
each router, EIGRP informs the BFD process of the IP address of the
neighbor that it needs to monitor. It is important to note that BFD does
not discover its peers dynamically. It relies on the configured routing
protocols to tell it which IP addresses to use and which peer
relationships to form.
BFD
on each router will form a BFD control packet. These packets are sent
at a minimum of one-second intervals* until a BFD session is
established. They may cross in transmission, although BFD is designed to
adapt to this condition.
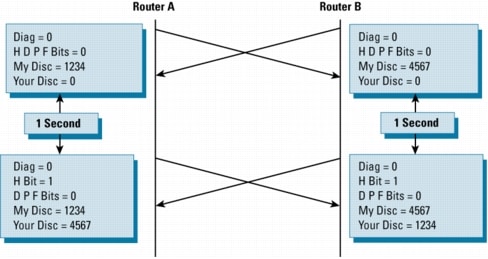
The
initial packets from either side will be very similar: Vers, Diag, the
H, D, P, and F bits will all be set to zero. My Discriminator will be
set to a value which is unique on the transmitting router; Your
Discriminator is set to zero, because the BFD session has yet to be
established**. The values of the TX and RX timers will be set to the
values found in the configuration of the device.
After
the remote router receives a BFD control packet during the session
initiation phase, it will copy the value of the "My Discriminator" field
into its own "Your Discriminator" field and set the H ("I Hear You")
bit for any subsequent BFD control packets it transmits. Once both
systems see their own Discriminators in each other's control packets,
the session is "officially" established. Both systems will continue to
send at (at least) one-second intervals until they see the appropriate
Discriminators in each other's BFD control packets.
The
Discriminator values can also be used to multiplex/demultiplex sessions
if there are multiple BFD connections between a pair of BFD peers, or
to allow the changing of an IP address on a BFD interface without
causing the BFD session to be reset.
Figure 2 illustrates the initial BFD session setup.
*
This value is fixed at one second in the first phase. It may be
configurable in later phases. It is also worth noting that the Internet
draft for BFD defines two modes for session initiation, Active and
Passive. An Active node sends BFD control packets in an effort to
establish a BFD session. A Passive node does not send any BFD packets
until it receives BFD packets from an Active node. In the first phase,
Cisco devices implementing BFD will always be Active nodes.
**
Although this example is good for illustrative purposes, it is actually
rather unlikely-because it requires near-simultaneous transmission of
the initial BFD packet by both systems. The more likely occurrence is
that one system sends the initial BFD packet, and the receiving system
responds back with the "I Hear You" bit set, the "My/Your Discriminator"
and other relevant fields populated.
Figure 2. BFD Session Setup
Concurrent
with the exchange of control packets to establish the BFD session, BFD
timers are also negotiated. The negotiation of the initial BFD timers is
somewhat anomalous, because-unlike the subsequent timer changes-it
occurs without the exchange of Poll and Final (P and F) bits. The P and F
bits are used to ensure that the remote device received the packet
requesting the timer change. However, this exchange is not required
during initial session setup, as the fact that the remote device changed
the value of "Your Discriminator" and set the H bit in subsequent
packets is sufficient to ensure that it received the currently requested
timer values.
The next section of this document will discuss the details of timer negotiation.
BFD Timer Negotiation
The
process of BFD timer negotiation between two BFD devices is a very
simple one, and occurs in a few steps. A device needs to assure three
things before it can negotiate a BFD timer:
• That its peer device saw the packet containing the local device's proposed timers
• That it never sends BFD control packets faster than the peer is willing to receive them
• That the peer never send BFD control packets faster than the local system is willing to receive them
As
mentioned earlier, the setting of "Your Discriminator" and the H bit
are sufficient to allow the local device to know that the remote device
has seen its packets during initial timer exchange. Once these timers
have been negotiated, they can be renegotiated at any time during the
session without causing a session reset. The existing timers are
maintained during the negotiation period, and the new timers do not take
effect until they are acknowledge via a Poll bit and Final bit
exchange.
The
device that changed its timers will set the P bit on all subsequent BFD
control packets, until it receives a BFD control packet with the F bit
set from the remote system. This exchange of bits guards against packets
that might otherwise be lost in transit. It is extremely important to
note that the setting of the F bit by the remote system does not imply
that it accepts the newly proposed timers. It merely indicates that the
remote system has seen the packets in which the timers were changed.
How,
then, are the timers actually negotiated? Each system, upon receiving a
BFD control packet will take the "Required Min RX Interval" and compare
it to its own "Desired Min TX Interval" and take the greater (slower)
of the two values and use it as the transmission rate for its BFD
packets. Thus, the slower of the two systems determines the transmission
rate.
Because
this comparison is performed independently by either peer, it is
possible to have asynchronous transmission rates on the link. That is,
one peer will be sending BFD control packets more frequently in one
direction than the peer is sending in the other direction.
Figure 3 illustrates both Poll/Final bit usage, and timer negotiation:
Figure 3. BFD Timer Negotiation
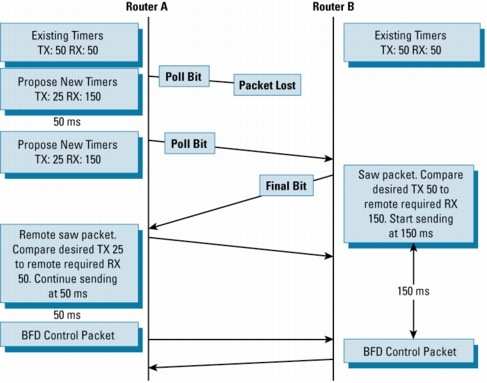
Figure
3 represents the "worst-case scenario" for BFD because Router A
proposes radically different timers than already exist; moreover, it
loses a packet when it suggests the change. Here is what occurs during
this scenario:
• Router A and Router B both start in a steady state, with agreed upon timers of 50 ms in both directions
•
Router A wishes to change its timers to transmit at 25ms and receive at
150 ms. It sends a BFD control packet with the P bit set. Unfortunately
this packet is lost in transit.
•
Router B would have continued to send BFD control packets at 50ms
intervals during this exchange. This is not illustrated in Figure 3.
•
After another 50 ms, Router A resends its request to change the timers.
Again it sets the Poll Bit. Remember, because the new timers are not in
effect yet, Router A must continue to honor the existing timers. The
retransmission thus occurs at the 50ms interval.
•
Router B sees the packet this time and compares the requested RX
interval to its own TX interval. The requested RX interval is larger, so
Router B throttles back to sending BFD control packets at 150ms
intervals.
•
Router A receives the packet with the F bit set. The remote timers are
still set at 50ms and 50ms. It compares the requested RX interval to its
own Desired TX interval of 25ms. The requested RX interval is larger,
so Router B continues to send at 50ms intervals
• The timer negotiation is complete: Router A sends at 50ms intervals, while Router B sends at 150ms intervals.
While
the ability to negotiate timers does provide some configuration
flexibility, it is anticipated that initial BFD deployments will use
identical timer configurations on BFD peers sharing the same media
types. Still, timer negotiation does provide some protection against
misconfiguration. Even if one peer sets an absurdly low TX or RX timer,
the value will be negotiated upwards by a correctly configured peer.
It
is also worth noting that-even though the timers have been negotiated
to new values-the actual values in the BFD packets remain at the
locally-configured settings. For example, although Router B is
transmitting at 150ms, an inspection of Router B's BFD control packet
would show its Desired Min TX Interval still set to 50ms. Only an
internal timer on the device has changed.
The
Detect Multiplier is also communicated in the BFD control packets, but
is not negotiated, so it is possible to have different detect-timer
values at either side of the BFD session.
BFD Failure Detection
Once
the BFD session and appropriate timers have been negotiated, the BFD
peers will send BFD control packets to each other at the negotiated
interval. As previously mentioned, this assumes BFD Asynchronous mode;
BFD Demand mode functions differently. These control packets function as
a heartbeat, very similar to an IGP HELLO protocol, except at a more
accelerated rate.
As
long as each BFD peer receives a BFD control packet within the
detect-timer period, the BFD session remains up and any routing protocol
associated with BFD maintains its adjacencies. If a BFD peer does not
receive a control packet within the detect interval, it informs any
clients of that BFD session (i.e. any routing protocols) about the
failure. It is up to the routing protocol to determine the appropriate
response to that information. The typical response will be to terminate
the routing protocol peering session and reconverge, bypassing the
failed peer.
The preceding information brings up three important points:
• BFD is a "liveliness" detection protocol, but does not-in itself-determine the correct reaction to a detected failure.
•
BFD can be used at any protocol layer. It could, for example, detect
Physical or Data Link layers failures, if the existing mechanisms did
not provide sufficiently speedy detection. However, in the first phase
of Cisco BFD support, all BFD clients, particularly the Layer 3 routing
protocols (OSPF, IS-IS, EIGRP, and BGP) are at the Network layer.
•
Although a single BFD session could, theoretically support multiple
client protocols monitoring the same peer, Cisco devices will use one
BFD session per client protocol in the first phase of BFD support. In
other words, if a network is running OSPF and BGP across the same link
to the same peer, it would have two discreet BFD sessions.
If
a BFD device fails to receive a BFD control packet within the
detect-timer [(Required Minimum RX Interval) * (Detect Multiplier)],
then it informs its client protocol that a failure has occurred. Each
time a BFD successfully receives a BFD control packet on a BFD session,
the detect-timer for that session is reset to zero. Thus, the failure
detection is dependant upon received packets, and is independent of when
the receiver last transmitted a packet. This is illustrated in Figure
4:
Figure 4. BFD Failure Scenario
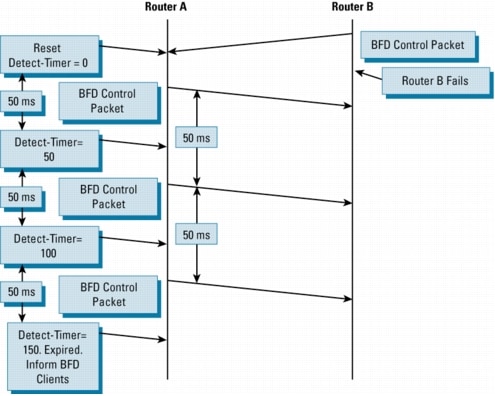
In
its next BFD control packet, Router A will set the diagnostic field to a
value which indicates why the session was taken down. In this case,
the diagnostic will be 1: Control Detection Time Expired. Diagnostics
are useful to differentiate between real failures, versus administrative
actions. For example, if the network administrator disabled BFD for
this session, the diagnostic would be 7: Administratively Down. See BFD Packet Formats above for a list of all possible diagnostics.
CONFIGURING BFD
BFD can be configured in two steps.
The
first step in configuring BFD is setting the baseline parameters for
all BFD sessions on an interface. The configuration occurs at the
interface level and the syntax is as follows:
[no] bfd interval <50-999> min_rx <1-999> multiplier <3-50>
interval: determines how frequently (in milliseconds) BFD packets will be sent to BFD peers.
min_rx: determines how frequently (in milliseconds) BFD packets will be expected to be received from BFD peers
multiplier:
The number of consecutive BFD packets which must be missed from a BFD
peer before declaring that peer unavailable, and informing the
higher-layer protocols of the failure
Once
the baseline parameters have been set, individual protocols must be
informed that they will be using BFD for failure detection.
In
the first release of BFD, the supported protocols are OSPF, IS-IS,
EIGRP and BGP. This document focuses on EIGRP configuration.
There
are two different methods to inform EIGRP that it should use BFD for
failure detection. BFD can be enabled at the router sub-mode if all
EIGRP neighbors have implemented BFD, and it will be universally
employed on all interfaces:
!
router eigrp 123
bfd all-interfaces
!
If
the user does not wish to enable BFD on all interfaces, it can be
enabled on a per-interface basis. This, again, is enabled in router
sub-mode.
!
router eigrp 123
bfd interface Gig1/0
!
BFD DEPLOYMENT
Deployment Alternatives
When
deploying any protocol or IP functionality, it is appropriate to
consider all the alternatives, and be aware of any trade-offs being
made. The closest alternative to BFD in conventional EIGRP deployments
is use of modified hello and hold timers. By setting EIGRP hello and
hold timers to their absolute minimums, the EIGRP protocol to reduce its
failure detection mechanism to within the 1-2 second range.
There are several advantages to BFD over the reduced timer mechanism:
•
Because BFD is not tied to any particular routing protocol, it can me
used as a generic and consistent failure detection mechanism for OSPF,
IS-IS, EIGRP, and BGP.
•
Because some parts of BFD can be distributed to the data plane, it can
be less CPU-intensive than reduced timers, which exist wholly at the
control plane.
• Reduced EIGRP timers have an absolute minimum detection timer of 1-2 seconds; BFD can provide sub-second failure detection.
BFD also shares some common caveats with reduced EIGRP timers:
•
BFD can potentially generate false alarms-signaling a link failure when
one does not exist. Because the timers used for BFD are so tight, a
brief interval of data corruption or queue congestion could potentially
cause BFD to miss enough control packets to allow the detect-timer to
expire. While the transmission of BFD control packets is managed by
giving them the highest possible queue priority, little can be done
about prioritizing incoming BFD control packets.
•
BFD will consume some CPU resources, although many optimizations have
been made to ensure the CPU usage is minimal. On non-distributed
platforms, in-house testing has shown a minor 2% CPU increase (above
baseline) when supporting one hundred concurrent BFD sessions*. On
distributed platforms, there is no impact on the main Route Processor
CPU, except during BFD session setup and teardown. It is important to
note that, because of this accelerated handling of BFD control packets,
all output features are bypassed. Users cannot, for example, filter or
apply Quality of Service (QoS) to transmitted BFD packets.
*
As always, performance numbers will vary depending on configuration and
traffic patterns. Customers are advised to do due-diligence lab testing
before deploying BFD in a live environment.
Releases, Hardware, and Interfaces
The first release of BFD will be supported on two hardware products that run Cisco IOS®
Software Releases 12.0S and 12.2S: the Cisco 7600 Series Router and the
Cisco 12000 Series Internet Router. The first release of Cisco IOS-XR
Software on the Cisco CRS-1 will also support BFD.
BFD will be supported on the Cisco 7600 Series Router in Release 12.2(18)SXE on the following hardware:
Supervisor:
• Sup720 (PFC3A)
• Sup720-3BXL
10GE Modules:
• WS-X6704-10GE
GE Modules:
• WS-X6816-GBIC
• WS-X6724-SFP
• WS-X6408A-GBIC
Optics:
• 10GE XENPAK (XENPAK-10GB-ER, XENPAK-10GB-LR)
• 10GE DWDM ITU XENPAK (P/N TBD)
• DWDM-GBIC-xx.xx DWDM GBIC
• WS-G548x Standard GBIC
• GLC-xx-xx Cisco SFP
DFC Cards:
• WS-F6700-DFC3A
• WS-F6700-DFC3B
• WS-F6K-DFC3
BFD support for OSPF, ISIS, and EIGRP will be available in the first phase release for the Cisco 7600 Series.
For
the Cisco 12000 Series Internet Router, the target release for BFD is
Release 12.0(31)S. It will provide BFD support for the OSPF, ISIS and
BGP protocols. Because BFD will run in distributed mode on the Cisco
12000 Series, it is important to verify that the appropriate line card
is also supported. Release 12.0(31)S targets all OC3/OC12/OC48 Engine 3
Packet Over SONET line cards, as well as all Engine 3 Ethernet Cards and
Engine 4+ Ethernet Cards.
BFD for the Cisco access platforms is planned for the first release of 12.4T.
Using BFD as Part of a Network Redundancy Plan
BFD
can be an important part of an overall network redundancy plan,
including other Cisco innovations like Nonstop Forwarding (NSF) and the
Hot Standby Router Protocol (HSRP). BFD should be deployed in those
sections of the network where subsecond failure detection is required,
but cannot be provided by traditional Layer 2 mechanisms.
Figure 5 illustrates an example of BFD usage.
Figure 5. BFD Deployment in a Mixed L2/L3 Environment
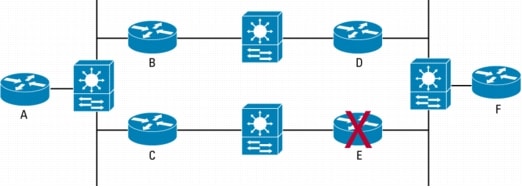
Even
though there is an alternate path available between Routers A and F, a
failure on Router E will be hidden from its neighbors (Routers C, D,
and F) by the presence of the Layer 2 switches. The switches maintain
Layer 2 connectivity for the neighbor routers, which causes them to fall
back on using the timers in the Layer 3 HELLO protocol to detect the
failure. At the EIGRP default timer settings, this could take up to 15
seconds.
In
contrast, if Routers C, D, E, and F were all running BFD, all of Router
E's neighbors could detect Router E's failure in less than a second,
and immediately begin the reconvergence to the A->B->D->F path.
Although
BFD can be used in other deployment scenarios, the L2 switch example is
one of the most common and difficult to solve without BFD.
It
is worth noting that EIGRP can provide nearly instantaneous convergence
through the use of feasible successor routes-which are essentially
pre-computed backup routes. However, this solves a different problem
from the initial failure detection provided by BFD. So, while EIGRP is
the fastest converging of all the IGP protocols, BFD still provides
significant value.
BFD Deployment Notes
•
Although it may be self-evident, it should be stated that BFD provides
its primary benefit in dual-homed environment. Once a failure is
detected by BFD, traffic needs an alternate path along which it can
flow. Although there is no restriction against using BFD in a
singly-homed environment, the benefits are few. It does, however, alert
the network administrator more quickly to a problem requiring manual
intervention.
•
As an added layer or protection, the network administrator should
consider running BFD in conjunction with Cisco IP Event Dampening http://www.cisco.com/en/US/products/sw/iosswrel/ps1838/products_feature_guide09186a0080134a41.html.
If
link failures are caused by an intermittent fluctuation at the physical
layer initiated by a dirty fiber, loose connector, misbehaving GBIC, or
some other cause, BFD will faithfully detect all of these failures.
However, it cannot distinguish that a particular link has been bouncing
up and down. Cisco IP Event Dampening was intended to mitigate precisely
this problem.
•
Although some protocols like HSRP and Multicast are not currently
BFD-enabled, they can obtain some incremental benefit from BFD
deployment. Because these protocols rely on the underlying IGP to
determine their reactions to failure, the ability of BFD to help the IGP
converge more quickly benefits all upper layer protocols.
•
Some care should be used when using BFD in conjunction with other High
Availability strategies. Cisco NSF, for example, can provide nearly
instantaneous failover between an active and a standby Route Processor
in the case of control plane forwarding. However, depending on the
platform, there may be enough of a traffic outage during the switchover
to cause BFD to prematurely signal a link failure.
•
Dual-ring SONET using Automatic Protection Switching (APS) is another
deployment scenario where BFD may be inappropriate. SONET with APS
should already supply ~50ms switchover protection, and BFD should not be
required. The same rule should apply to Spatial Reuse Protocol (SRP)
links-either Dynamic Packet Transport (DPT) or Resilient Packet Ring
(RPR).
•
While all interface types supported in the first phase of Cisco BFD
support are high-speed, some care should be taken once BFD becomes more
generally available on other platforms with lower-speed links. In
particular, the Desired TX Interval and Required Min RX Interval should
be set to values appropriate for the link type. While a 50ms heartbeat
will be almost unnoticeable on a 10Gbps link, it will have a more
significant effect on a 64Kbps link. Performing a PING to the remote BFD
peer will estimate the correct timer setting. The timers must be set to
at least the measured response time, although a value several orders of
magnitude larger would be preferred.
BFD TROUBLESHOOTING
The
Cisco BFD implementation offers a wide variety of tools for determining
the status of BFD peerings, as well as for debugging the BFD protocol
itself.
BFD Status and Debugging
The following commands are implemented to help troubleshoot BFD:
show bfd neighbors [details]
The show bfd neighbors command provides a line-by-line listing of existing BFD adjacencies. If the option details keyword is included, the output will also show BFD protocol parameters and timers per neighbor.
Figure 6. sh bfd neighbors details
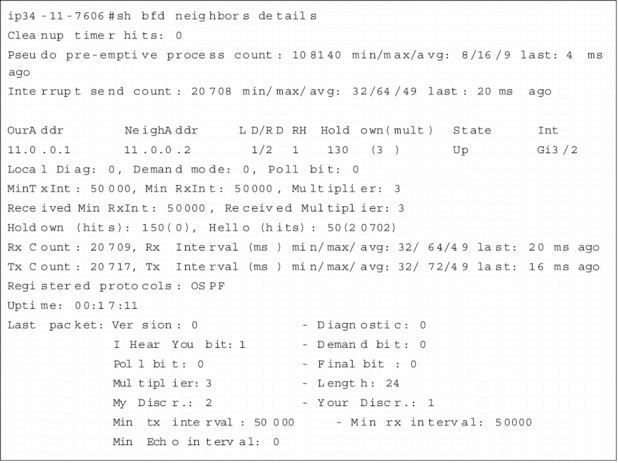
The information contained in Figure 6 can be interpreted by inspecting the fields in the BFD Packet Formats section of this document.
debug bfd packet [neighbor address]
The debug bfd packet command prints debugging information about BFD packets sent and received. The optional [neighbor address] is used to filter output based on neighbor IP address. Because
BFD is designed to send and receive packets at a very high rate, some
care should be used before enabling this command, especially if there
are a large number of BFD peers. It should only be enabled on a live
network at the direction of Cisco Technical Assistance Center personnel.
Figure 7. BFD Debugging Output
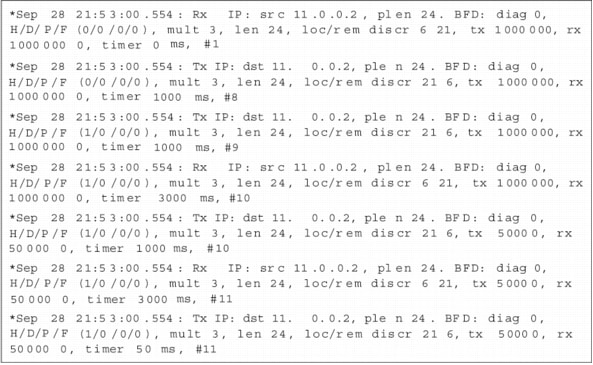
Figure
7 shows the initial setup of a BFD session. As mentioned before,
initial timers are set to 1 second until the session is initialized.
Then the timers change to their locally configured values-in this case,
50 milliseconds*.
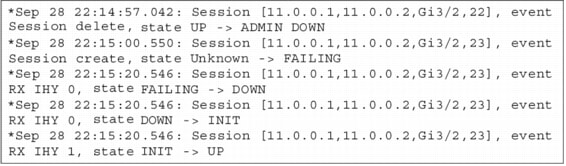
debug bfd event
This command prints debugging information about BFD state transitions. There are four main states for a BFD Session:
• Init: the initial state of a BFD session. No BFD packets have yet been received from the peer of the session.
• Up: a BFD Control packet with the "I Hear You" (IHY) bit set to 1 has been received.
• Failing:
a transitional state from the UP state. Either the detection timer is
in the process of expiring, or a BFD Control packet with the "I Hear
You" bit set to 0 has been received.
• Down: a BFD Control packet with the "I Hear You" bit set to 0 has been received.
As
an example of state transition, if a BFD session is in the UP state,
and the peer begins sending BFD packets with IHY=0, the state transition
is as follows:
UP->FAILING->DOWN->INIT
* Remember that timers are configured in milliseconds, but their values are
transmitted in BFD packets as microseconds. Thus, 50 milliseconds
equates to 50,000 microseconds. This explains why we see 50000 as the tx
and rx timers.
The following figure shows the transition when OSPF is cleared then restarted:
Figure 8. Debugging BFD Events
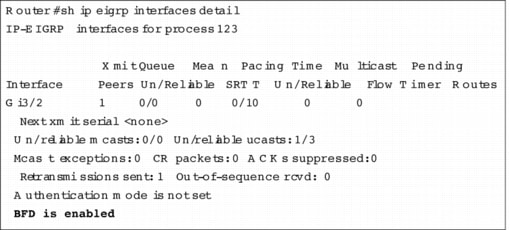
EIGRP BFD Status
As
mentioned previously, BFD is only useful if it is associated with a
specific upper layer protocol, and can quickly inform that protocol
about changes in Layer 2 state. Therefore, a necessary part of
troubleshooting BFD is being able to confirm the interaction between BFD
and the upper layer protocol. In the case of EIGRP, this is done
through the show ip eigrp interfaces detail command.
Figure 9. show ip eigrp interfaces detail
CONCLUSION
Bidirectional
Forwarding Detection provides a method for network administrators to
configure sub-second Layer 2 failure detection between adjacent network
nodes. Furthermore, they can configure their routing protocols to
respond to BFD notifications, and begin Layer 3 route convergence almost
immediately.
Provided
that the appropriate caveats mentioned in this document are followed,
BFD can be a powerful tool and an important part of a network-wide
availability plan.